单目3D检测-坐标系、数据集
429人参与 • 2024-08-03 • 车联网
0.单目3d检测任务
(
c
,
x
,
y
,
z
,
w
,
l
,
h
,
θ
)
(c,x,y,z,w,l,h,\theta)
(c,x,y,z,w,l,h,θ)
θ
\theta
θ: 目标在三维空间中相对于水平方向的航向信息
1.坐标系转换关系:
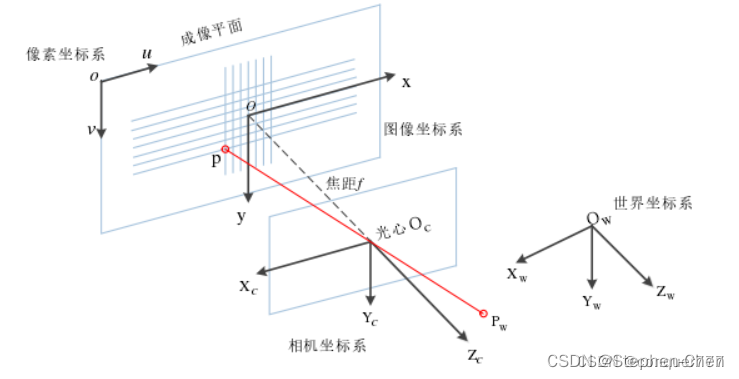
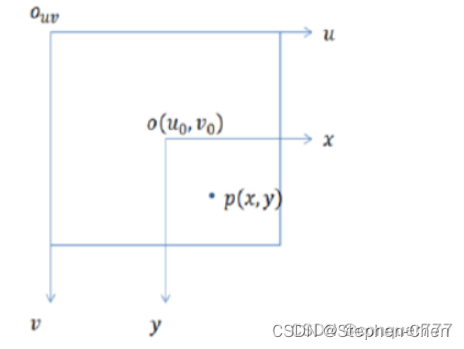
1.1.像素坐标系
o − u , v o-u,v o−u,v:
1.2图象坐标系
o − x , y o-x,y o−x,y:
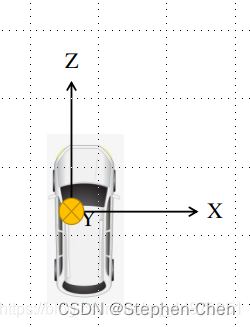
1.3相机坐标系:
o c − x c , y c , z c o_c-x_c,y_c,z_c oc−xc,yc,zc: 主要是和其他传感器、物体的位置做区分。
kitti数据集中相机坐标系如图所示:
1.4.世界坐标系
o w − x w , y w , z w o_w-x_w,y_w,z_w ow−xw,yw,zw:
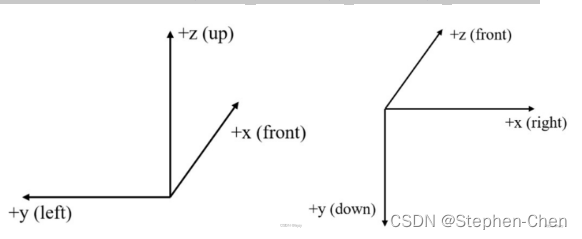
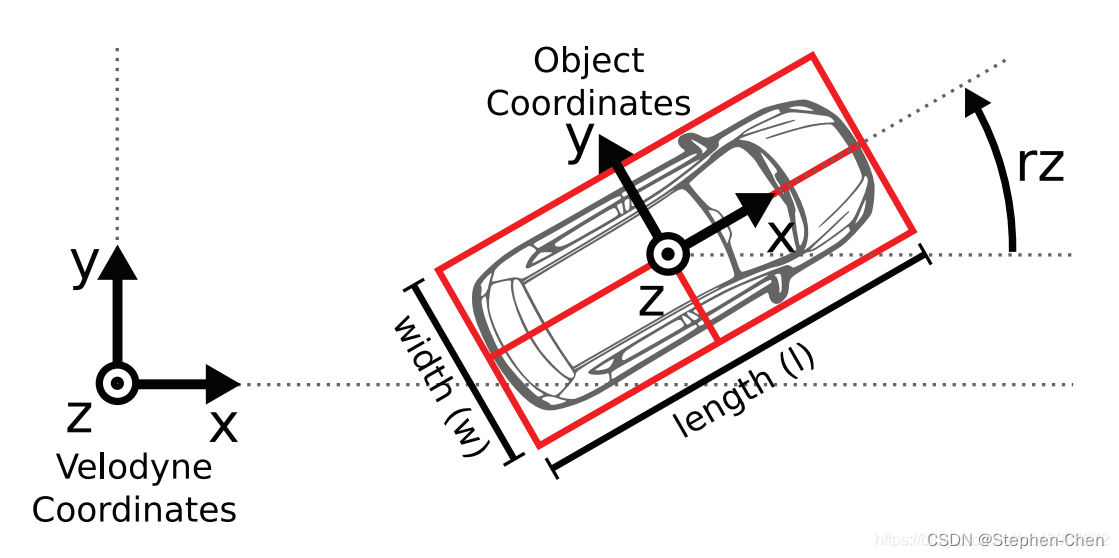
1.5激光雷达坐标系
激光雷达坐标系通常定义如下**左图**所示,其中x指向前方,y指向左方,z指向上方。
相机坐标系右图,和激光雷达不一样
1.6世界坐标系转为相机坐标系
设目标坐标系下某一点为 [ x , y , z ] [x,y,z] [x,y,z],该点在当前坐标系下的坐标为 [ x ’ , y ’ , z ’ ] [x’,y’,z’] [x’,y’,z’],变化方式如下:
[ x y z ] \begin{bmatrix}x \\y\\z\end{bmatrix} xyz = r [ x ⋅ y ⋅ z ⋅ ] + t r\begin{bmatrix}x^ ·\\y^·\\z^·\end{bmatrix}+t r x⋅y⋅z⋅ +t
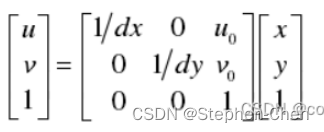
1.7图像坐标和像素坐标之间的转换
$$
d
x
dx
dx和
d
y
dy
dy表示单位像素在
x
y
xy
xy轴上的物理长度,写成齐次公式即为
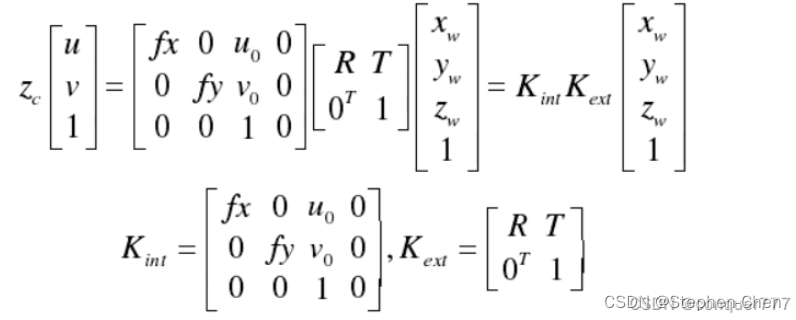
1.8像素坐标系和世界坐标系之间的转换
k
i
n
t
:
k_{int}:
kint: 相机内参矩阵,其值只和相机的结构有关。
f
x
=
f
/
d
x
,
f
y
=
f
/
d
y
f_x = f/d_x ,f_y = f/d_y
fx=f/dx,fy=f/dy
k
e
x
t
:
k_{ext}:
kext: 相机外参矩阵,也叫刚体运动中的变换矩阵。其中 r 为旋转矩阵
(
r
−
1
=
r
t
)
(r^{-1}= r^t)
(r−1=rt),t为平移向量。
r
、
t
r、t
r、t 则由相机在世界、相机坐标系中的位置姿态决定。
2.kitti数据集解析
文件结构:
calib文件:
p0: 7.215377000000e+02 0.000000000000e+00 6.095593000000e+02 0.000000000000e+00 0.000000000000e+00 7.215377000000e+02 1.728540000000e+02 0.000000000000e+00 0.000000000000e+00 0.000000000000e+00 1.000000000000e+00 0.000000000000e+00
p1: 7.215377000000e+02 0.000000000000e+00 6.095593000000e+02 -3.875744000000e+02 0.000000000000e+00 7.215377000000e+02 1.728540000000e+02 0.000000000000e+00 0.000000000000e+00 0.000000000000e+00 1.000000000000e+00 0.000000000000e+00
p2: 7.215377000000e+02 0.000000000000e+00 6.095593000000e+02 4.485728000000e+01 0.000000000000e+00 7.215377000000e+02 1.728540000000e+02 2.163791000000e-01 0.000000000000e+00 0.000000000000e+00 1.000000000000e+00 2.745884000000e-03
p3: 7.215377000000e+02 0.000000000000e+00 6.095593000000e+02 -3.395242000000e+02 0.000000000000e+00 7.215377000000e+02 1.728540000000e+02 2.199936000000e+00 0.000000000000e+00 0.000000000000e+00 1.000000000000e+00 2.729905000000e-03
r0_rect: 9.999239000000e-01 9.837760000000e-03 -7.445048000000e-03 -9.869795000000e-03 9.999421000000e-01 -4.278459000000e-03 7.402527000000e-03 4.351614000000e-03 9.999631000000e-01
tr_velo_to_cam: 7.533745000000e-03 -9.999714000000e-01 -6.166020000000e-04 -4.069766000000e-03 1.480249000000e-02 7.280733000000e-04 -9.998902000000e-01 -7.631618000000e-02 9.998621000000e-01 7.523790000000e-03 1.480755000000e-02 -2.717806000000e-01
tr_imu_to_velo: 9.999976000000e-01 7.553071000000e-04 -2.035826000000e-03 -8.086759000000e-01 -7.854027000000e-04 9.998898000000e-01 -1.482298000000e-02 3.195559000000e-01 2.024406000000e-03 1.482454000000e-02 9.998881000000e-01 -7.997231000000e-01
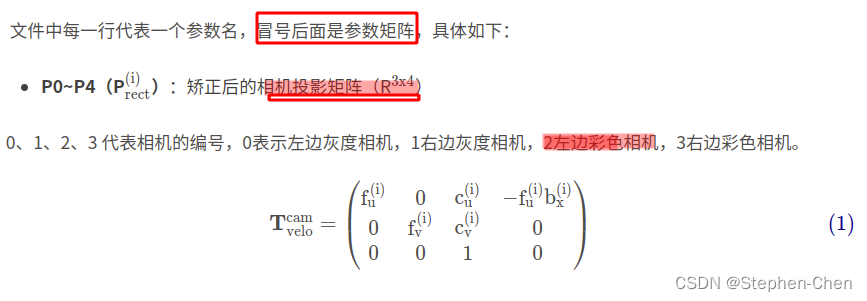
其中
b
x
(
i
)
b^{(i)}_ x
bx(i)表示相对于参考摄像机0的基准值(以米为单位)。

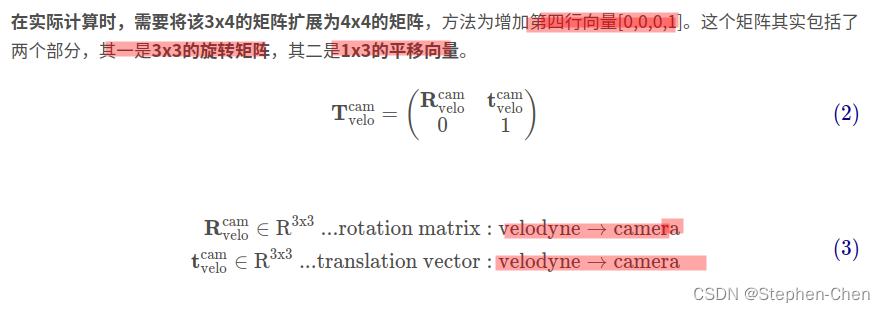
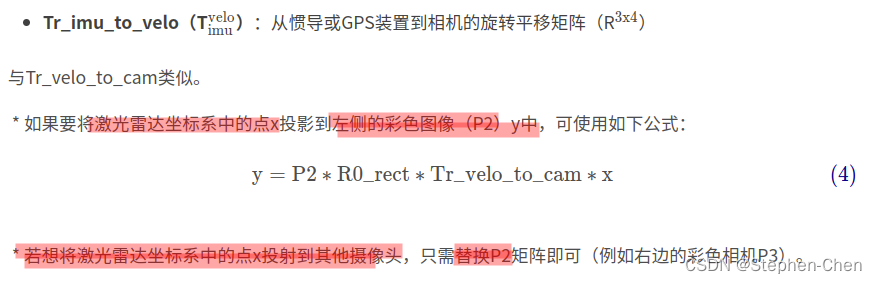
tr_velo_to_cam:(
t
v
e
l
o
c
a
m
t_{velo}^{cam}
tvelocam):从雷达到相机的旋转平移矩阵(
r
3
∗
4
r^{3*4}
r3∗4):
label文件
label文件是kitti中object的标签和评估数据,以“000001.txt”文件为例,包含样式如下:
truck 0.00 0 -1.57 599.41 156.40 629.75 189.25 2.85 2.63 12.34 0.47 1.49 69.44 -1.56
car 0.00 0 1.85 387.63 181.54 423.81 203.12 1.67 1.87 3.69 -16.53 2.39 58.49 1.57
cyclist 0.00 3 -1.65 676.60 163.95 688.98 193.93 1.86 0.60 2.02 4.59 1.32 45.84 -1.55
dontcare -1 -1 -10 503.89 169.71 590.61 190.13 -1 -1 -1 -1000 -1000 -1000 -10
dontcare -1 -1 -10 511.35 174.96 527.81 187.45 -1 -1 -1 -1000 -1000 -1000 -10
dontcare -1 -1 -10 532.37 176.35 542.68 185.27 -1 -1 -1 -1000 -1000 -1000 -10
dontcare -1 -1 -10 559.62 175.83 575.40 183.15 -1 -1 -1 -1000 -1000 -1000 -10
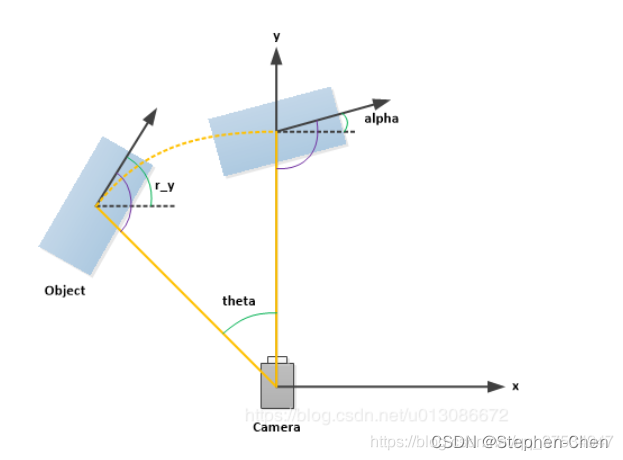
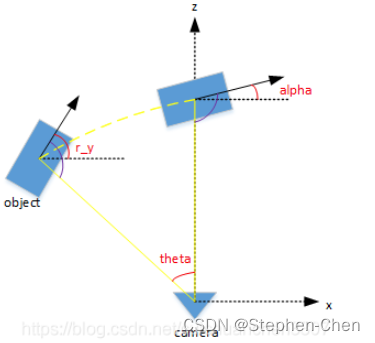
里面的rotation_y和alpha容易让人弄错,下面详细介绍一下
摄像机坐标系和物体坐标系如下:
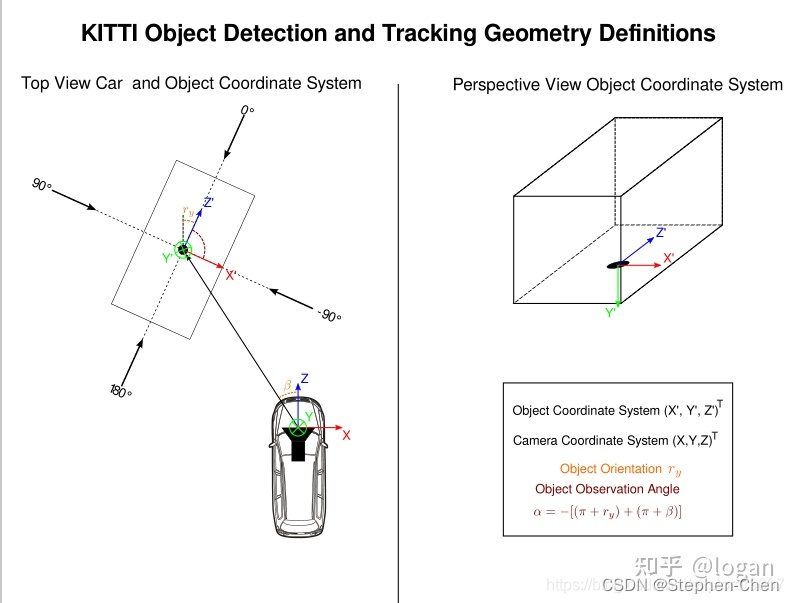
r_y + pi/2 -theta = alpha +pi/2(即图中紫色的角是相等的)
alpha + theta = rotation_y
参考文献:
[kitti参数](https://zhuanlan.zhihu.com/p/403188378)
3d目标检测中的旋转角/航向角θ应该如何理解?
rope3d数据集
赞 (0)
您想发表意见!!点此发布评论




发表评论