基于Pytorch深度学习的卫星图像分类(Kaggle比赛项目实战)
134人参与 • 2025-10-25 • Pycharm
一、主题介绍:
在pytorch框架下,实战kaggle比赛:卫星图像分类(satellite remote sensing image -rsi-cb256),利用pycharm调试运行代码。
二、环境配置要求:
python版本:3.7
pycharm版本:2020.3.5
pytorch版本:1.12.1
numpy版本:1.21.6
matplotlib版本:3.2.2
tqdm版本:4.65.0
把需要的包下载好,在你的有cuda或者cpu的pytorch环境中下载
三、主要步骤与涉及知识:
3.1 主要步骤:
- 启用pycharm,新建实验项目,选择编译环境
- 下载数据集
- 预处理数据集
- 定义网络
- 模型训练及预测
3.2涉及知识:常见anaconda终端命令的使用
1.python编程语言
2.数据处理分析库pandas、科学计算库numpy,进度条库tqdm,画图库matplotlib,python机器学习库等使用,torch中nn、loss、optimizer模块使用
四、实验步骤:
4.1 数据下载
在pycharm中新建实验三项目,名为“deep_learning_experiments_3”,在该项目文件夹路径下下载项目数据。
方法 网址下载 satellite image classification | kaggle
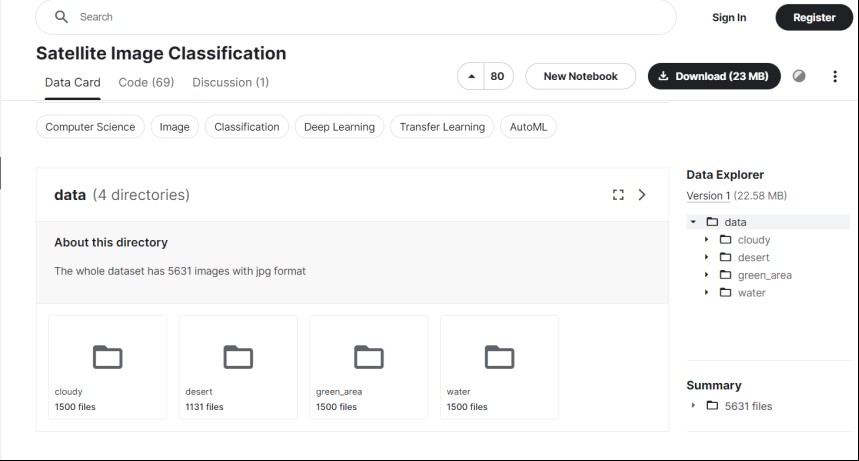
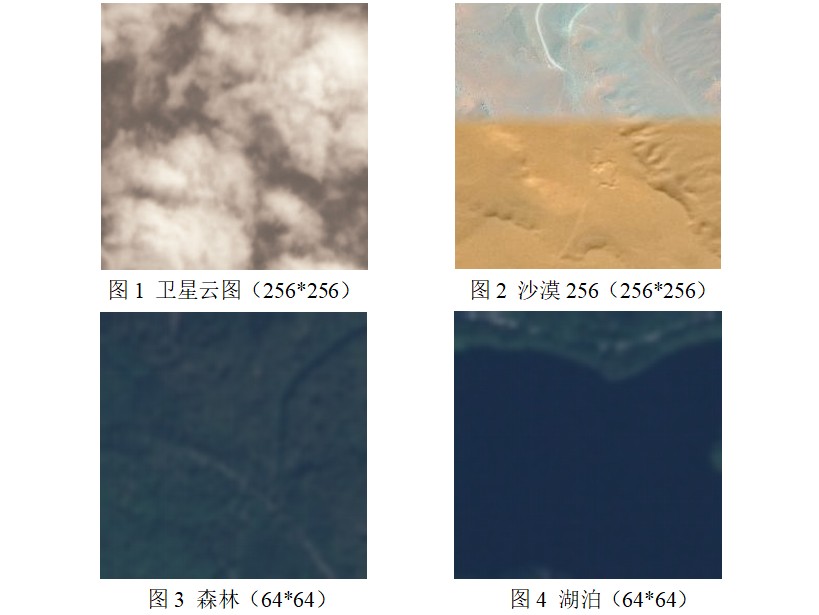
卫星图像分类数据集包含来自传感器和谷歌地图快照的大约5600张图像。它有属于4个不同类别的卫星图像。
cloudy:从卫星拍摄的1500张云图像。desert:从卫星拍摄的1131张沙漠图像。
green_area:主要是森林覆盖的卫星图像1500张图片。water:1500张湖泊和其他水体的卫星图像。
4.2数据预处理
4.2.1导入所需的pytorch模块定义一些常量
import torch from torch.utils.data import dataloader, subset from torchvision import datasets, transforms # 验证集比例 valid_split = 0.2 # 批量大小 batch_size = 64 # 数据根目录路径 root_dir = 'd:/pycharm projects/deep_learning_experiments/experiment_4/data'
使用20%的数据进行验证,批大小为64,如果本地机器上训练面临oom(内存不足)问题,那么降低批大小32或16。
batch_size(批次大小)是机器学习和深度学习训练中的一个核心超参数,用于控制每次迭代时模型处理的样本数量。简单来说,当你有一个包含 1000 张图片的训练集,若设置
batch_size=100,则模型会:
- 每次从训练集中取 100 张图片
- 计算这 100 张图片的总损失(通过前向传播)
- 根据根据总损失反向传播更新一次模型参数
- 重复这一过程,直到所有 1000 张图片都被处理完(即完成 1 个 epoch 的训练)
作用与影响:
内存占用:
batch_size越大,一次需要加载到内存(或 gpu 显存)的数据越多,可能导致内存不足(oom 错误)。训练效率:较大的
batch_size可以利用 gpu 并行的并行计算能力加速训练(单次处理处理大批次数据的效率更高),但单次迭代的计算时间会更长。模型收敛:
- 过小的
batch_size(如batch_size=1,即随机梯度下降 sgd):训练波动大,收敛路径曲折,但可能更容易跳出局部最优。- 适中的
batch_size(如 32、64、128):在收敛稳定性和效率间取得平衡,是最常用的选择。- 过大的
batch_size:训练更稳定,但可能收敛到较差的局部最优,且需要更大的学习率配合。
4.2.2训练集和测试集转换
#训练集数据增强,以及将图像数据类型转化为张量做归一化
train_transform = transforms.compose([
transforms.resize(224),
transforms.randomhorizontalflip(p=0.5),
transforms.randomverticalflip(p=0.5),
transforms.gaussianblur(kernel_size=(5, 9), sigma=(0.1, 5)), #kernel_size:高斯卷积核大小, sigma:标准差(min,max)
transforms.randomrotation(degrees=(30, 70)),
transforms.totensor(),
transforms.normalize(
mean=[0.485, 0.456, 0.406],
std=[0.229, 0.224, 0.225]
)
])
valid_transform = transforms.compose([
transforms.resize((224, 224)),
transforms.totensor(),
transforms.normalize(
mean=[0.485, 0.456, 0.406],
std=[0.229, 0.224, 0.225]
)
])
#空间变换增强
#翻转 → 位置不变性
#旋转 → 方向不变性
#组合使用 → 强大的几何不变性
#外观变换增强
#高斯模糊 → 对图像质量的鲁棒性
#标准化增强效果可视化
假设原始图像经过这个流水线可能产生:
原图 → 清晰、正立的图像
增强1 → 水平翻转 + 轻微模糊
增强2 → 旋转45° + 垂直翻转
增强3 → 强烈模糊 + 旋转60°
4.2.3定义数据加载器
# 加载数据集
dataset = datasets.imagefolder(root_dir, transform=train_transform)
dataset_test = datasets.imagefolder(root_dir, transform=valid_transform)
# 数据集信息
print(f"classes: {dataset.classes}") # 输出类别名称
dataset_size = len(dataset)
valid_size = int(valid_split * dataset_size)
# 随机划分训练集和验证集
indices = torch.randperm(len(dataset)).tolist() # 随机打乱索引
dataset_train = subset(dataset, indices[:-valid_size]) # 训练集:前80%
dataset_valid = subset(dataset_test, indices[-valid_size:]) # 验证集:后20%
print(f"total training images: {len(dataset_train)}")
print(f"total valid_images: {len(dataset_valid)}")
train_loader = dataloader(
dataset_train, batch_size=batch_size, shuffle=true # 训练时打乱
)
valid_loader = dataloader(
dataset_valid, batch_size=batch_size, shuffle=false # 验证时不打乱
)4. 3构建模型(resnet34)
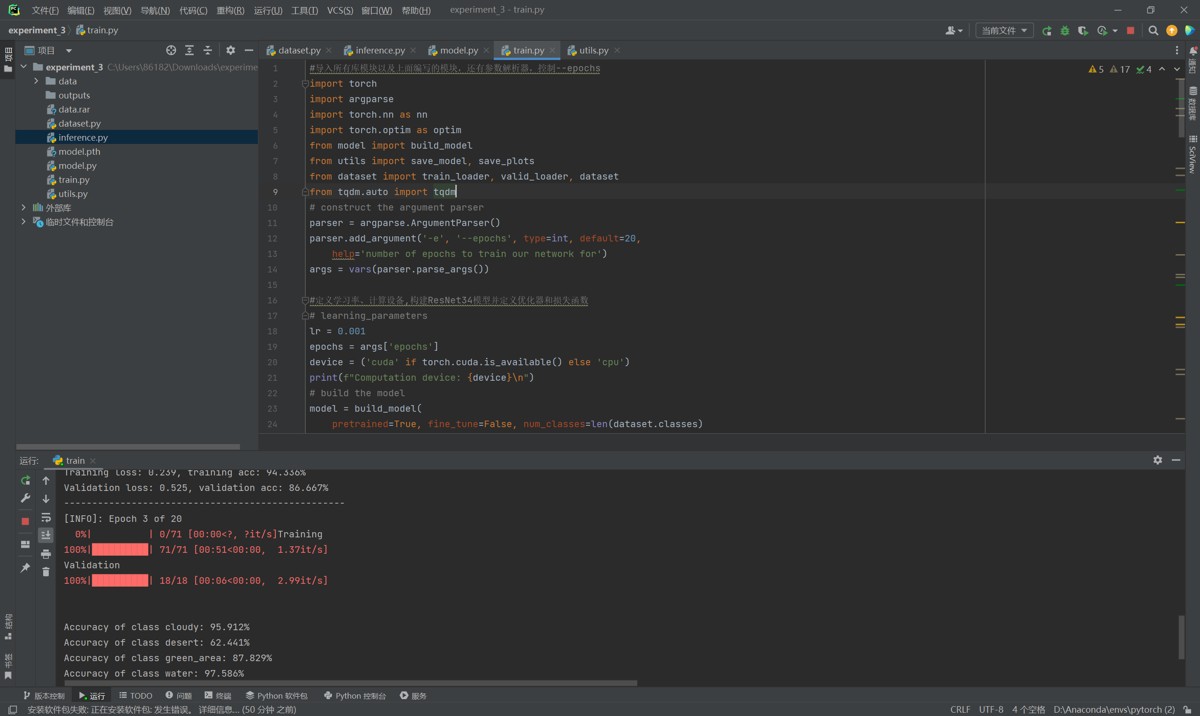
4.3.1训练脚本train.py
导入所有库模块以及上面编写的模块,还有参数解析器,控制--epochs
import torch
import argparse
import torch.nn as nn
import torch.optim as optim
from model import build_model
from utils import save_model, save_plots
from datasets import train_loader, valid_loader, dataset
from tqdm.auto import tqdm
# 通过命令行控制训练轮数
parser = argparse.argumentparser()
parser.add_argument('-e', '--epochs', type=int, default=20,
help='number of epochs to train our network for')
args = vars(parser.parse_args())4.3.2定义学习率、计算设备,构建resnet34模型并定义优化器和损失函数
# 学习参数设置
#学习率: 0.001 (adam优化器的常用值)
#设备: 自动检测gpu/cpu
lr = 0.001
epochs = args['epochs']
device = ('cuda' if torch.cuda.is_available() else 'cpu')
print(f"computation device: {device}\n")
# 构建模型
model = build_model(
pretrained=true, fine_tune=false, num_classes=len(dataset.classes)
).to(device)
#总参数量: 所有参数的数量
#可训练参数: 仅计算需要梯度的参数
total_params = sum(p.numel() for p in model.parameters())
print(f"{total_params:,} total parameters.")
total_trainable_params = sum(
p.numel() for p in model.parameters() if p.requires_grad)
print(f"{total_trainable_params:,} training parameters.\n")
# 优化器: adam,适合大多数场景
optimizer = optim.adam(model.parameters(), lr=lr)
# 损失函数: 交叉熵损失,用于多分类
criterion = nn.crossentropyloss()4.3.3训练与验证函数
4.3.3.1训练函数
# 训练过程
def train(model, trainloader, optimizer, criterion):
model.train()
print('training')
train_running_loss = 0.0
train_running_correct = 0
counter = 0
for i, data in tqdm(enumerate(trainloader), total=len(trainloader)):
counter += 1
image, labels = data
image = image.to(device)
labels = labels.to(device)
# 梯度清零
optimizer.zero_grad()
# 前向传播
outputs = model(image)
# 计算损失
loss = criterion(outputs, labels)
train_running_loss += loss.item()
# 计算准确率
_, preds = torch.max(outputs.data, 1)
train_running_correct += (preds == labels).sum().item()
# 反向传播
loss.backward()
# 更新参数
optimizer.step()
# 统计一批次的损失率和准确率
epoch_loss = train_running_loss / counter
epoch_acc = 100. * (train_running_correct / len(trainloader.dataset))
return epoch_loss, epoch_acc在每个epoch之后,该函数返回该epoch的损失和准确度。
epoch(轮次)是深度学习训练中的核心概念,指模型完整遍历一次所有训练数据的过程,可以理解为 “训练一轮”。简单来说,假设你有 1000 张训练图片,无论
batch_size(批次大小)是多少,只要模型把这 1000 张图片全部处理完一次,就算完成了 1 个epoch。比如之前的代码设置了20个epoch,就意味着模型要把 4502 张训练图完整训练 20 遍。
4.3.3.2验证函数
def validate(model, testloader, criterion, class_names):
# 设置为评估模式(禁用dropout和batchnorm的随机性)
model.eval()
print('验证中...')
# 累计损失值
valid_running_loss = 0.0
# 累计正确预测数量
valid_running_correct = 0
# 批次计数器
counter = 0
# 初始化列表来跟踪每个类别的准确率
# class_correct: 每个类别的正确预测数
# class_total: 每个类别的总样本数
class_correct = list(0. for i in range(len(class_names)))
class_total = list(0. for i in range(len(class_names)))
# 禁用梯度计算以节省内存和加速计算
with torch.no_grad():
# 遍历验证集中的所有批次
for i, data in tqdm(enumerate(testloader), total=len(testloader)):
counter += 1
# 获取图像数据和标签
image, labels = data
# 将数据转移到指定设备(gpu或cpu)
image = image.to(device)
labels = labels.to(device)
# 前向传播:通过模型获取预测输出
outputs = model(image)
# 计算损失值
loss = criterion(outputs, labels)
# 累加损失值
valid_running_loss += loss.item()
# 计算准确率:获取预测类别(最大概率的索引)
_, preds = torch.max(outputs.data, 1)
# 累加正确预测的数量
valid_running_correct += (preds == labels).sum().item()
# 计算每个类别的准确率
# 获取每个样本的预测是否正确(布尔张量)
correct = (preds == labels).squeeze()
# 遍历当前批次中的每个样本
for i in range(len(preds)):
# 获取当前样本的真实标签
label = labels[i]
# 如果预测正确,则对应类别的正确数加1
class_correct[label] += correct[i].item()
# 对应类别的总样本数加1
class_total[label] += 1
# 计算整个epoch的平均损失(总损失除以批次数量)
epoch_loss = valid_running_loss / counter
# 计算整体准确率(正确预测数除以总样本数,转换为百分比)
epoch_acc = 100. * (valid_running_correct / len(testloader.dataset))
# 打印每个类别的准确率
print('\n')
for i in range(len(class_names)):
# 计算并打印每个类别的准确率
print(f"类别 {class_names[i]} 的准确率: {100 * class_correct[i] / class_total[i]:.3f}%")
print('\n')
# 返回平均损失和整体准确率
return epoch_loss, epoch_acc4.3.4训练循环
# 初始化列表来跟踪损失和准确率
# train_loss: 训练损失列表
# valid_loss: 验证损失列表
# train_acc: 训练准确率列表
# valid_acc: 验证准确率列表
train_loss, valid_loss = [], []
train_acc, valid_acc = [], []
# 开始训练循环
for epoch in range(epochs):
# 打印当前训练轮次信息
print(f"[info]: 第 {epoch+1} 轮 / 共 {epochs} 轮")
# 训练一个epoch并获取训练损失和准确率
train_epoch_loss, train_epoch_acc = train(model, train_loader,
optimizer, criterion)
# 验证一个epoch并获取验证损失和准确率
valid_epoch_loss, valid_epoch_acc = validate(model, valid_loader,
criterion, dataset.classes)
# 将当前epoch的结果添加到列表中
train_loss.append(train_epoch_loss)
valid_loss.append(valid_epoch_loss)
train_acc.append(train_epoch_acc)
valid_acc.append(valid_epoch_acc)
# 打印当前epoch的训练和验证结果
print(f"训练损失: {train_epoch_loss:.3f}, 训练准确率: {train_epoch_acc:.3f}%")
print(f"验证损失: {valid_epoch_loss:.3f}, 验证准确率: {valid_epoch_acc:.3f}%")
print('-'*50) # 打印分隔线
# 保存训练好的模型权重(每个epoch都保存)
save_model(epochs, model, optimizer, criterion)
# 训练完成后保存损失和准确率图表
save_plots(train_acc, valid_acc, train_loss, valid_loss)
print('训练完成')4.3.5模型测试
4.3.5.1测试参数设置
# 导入必要的库
import torch # pytorch深度学习框架
import cv2 # opencv计算机视觉库,用于图像处理
import torchvision.transforms as transforms # pytorch图像变换模块
import argparse # 命令行参数解析库
# 构建参数解析器
# 创建argumentparser对象,用于处理命令行参数
parser = argparse.argumentparser()
# 添加输入参数
# -i 或 --input: 指定输入图像路径,默认值为'input/test_data/cloudy.jpeg'
parser.add_argument('-i', '--input',
default='input/test_data/cloudy.jpeg',
help='输入图像的路径')
# 解析输入参数并将其转换为字典格式
args = vars(parser.parse_args())
# 计算设备设置
# 指定使用cpu进行计算(如果需要gpu可改为'cuda')
device = 'cpu'4.3.5.2加载模型处理转换
对于预处理只需要将图像转换为 pil 图像格式,调整其大小,将其转换为张量,然后应用归一化。
# 定义所有类别标签的列表
# 对应模型的4个输出类别:多云、沙漠、绿地、水域
labels = ['cloudy', 'desert', 'green_area', 'water']
# 初始化模型并加载训练好的权重
# pretrained=false: 不加载预训练权重
# fine_tune=false: 不进行微调
# num_classes=4: 设置输出类别数为4
model = build_model(
pretrained=false, fine_tune=false, num_classes=4
).to(device) # 将模型移动到指定设备(cpu)
print('[info]: 正在加载自定义训练权重...')
# 加载训练好的模型检查点文件
# map_location=device: 确保权重加载到正确的设备上
checkpoint = torch.load('outputs/model.pth', map_location=device)
# 将训练好的权重加载到模型中
model.load_state_dict(checkpoint['model_state_dict'])
# 将模型设置为评估模式(禁用dropout和batchnorm的随机性)
model.eval()
# 定义图像预处理变换流程
transform = transforms.compose([
transforms.topilimage(), # 将numpy数组或tensor转换为pil图像
transforms.resize(224), # 调整图像大小为224x224像素
transforms.totensor(), # 将pil图像转换为tensor,并归一化到[0,1]
transforms.normalize( # 标准化处理,使用imagenet数据集的均值和标准差
mean=[0.485, 0.456, 0.406], # rgb通道的均值
std=[0.229, 0.224, 0.225] # rgb通道的标准差
)
])4.3.5.3读取图像与前馈
# 读取并预处理输入图像
# 使用opencv读取图像文件
image = cv2.imread(args['input'])
# 从文件路径中提取真实类别(ground truth)
# 例如:'input/test_data/cloudy.jpeg' -> 'cloudy'
gt_class = args['input'].split('/')[-1].split('.')[0]
# 保存原始图像的副本用于后续显示
orig_image = image.copy()
# 将图像从bgr格式转换为rgb格式(opencv默认使用bgr,但模型需要rgb)
image = cv2.cvtcolor(image, cv2.color_bgr2rgb)
# 对图像应用预处理变换(调整大小、标准化等)
image = transform(image)
# 添加批次维度(将3d张量[h,w,c]转换为4d张量[1,h,w,c])
# 因为模型期望输入具有批次维度
image = torch.unsqueeze(image, 0)
# 在不计算梯度的情况下进行推理(节省内存和计算资源)
with torch.no_grad():
# 将图像数据移动到设备并通过模型进行前向传播
outputs = model(image.to(device))
# 获取模型输出的最高概率类别
# torch.topk返回前k个最大值和对应的索引,这里k=1表示取最高概率
output_label = torch.topk(outputs, 1)
# 将预测的索引转换为对应的类别名称
pred_class = labels[int(output_label.indices)]
# 在原始图像上添加真实类别文本(绿色)
cv2.puttext(orig_image,
f"gt: {gt_class}", # 显示真实类别
(10, 25), # 文本位置坐标(x,y)
cv2.font_hershey_simplex, # 字体类型
1, # 字体大小
(0, 255, 0), # 字体颜色(绿色)
2, # 字体粗细
cv2.line_aa # 抗锯齿线型
)
# 在原始图像上添加预测类别文本(红色)
cv2.puttext(orig_image,
f"pred: {pred_class}", # 显示预测类别
(10, 55), # 文本位置坐标(x,y),在真实类别下方
cv2.font_hershey_simplex, # 字体类型
1, # 字体大小
(0, 0, 255), # 字体颜色(红色)
2, # 字体粗细
cv2.line_aa # 抗锯齿线型
)
# 在控制台打印真实类别和预测类别
print(f"真实类别: {gt_class}, 预测类别: {pred_class}")
# 显示带有标注的结果图像
cv2.imshow('result', orig_image)
# 等待按键操作(0表示无限等待)
cv2.waitkey(0)
# 将结果图像保存到outputs目录
# 文件名格式:outputs/真实类别.png
cv2.imwrite(f"outputs/{gt_class}.png", orig_image)4.4训练测试终端命令
4.4.1训练命令
python train.py --epochs 100
4.4.2测试命令
python inference.py --input test_data/cloudy.jpg
或者直接点运行也可以
运行中……
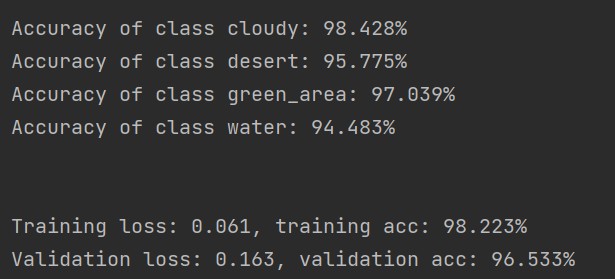
最终结果展示:
再运行下inference.py文件验证下:
随便放个图片:

验证结果完全正确!!!是绿洲图像


又测试了下cloudy的,也完全正确:

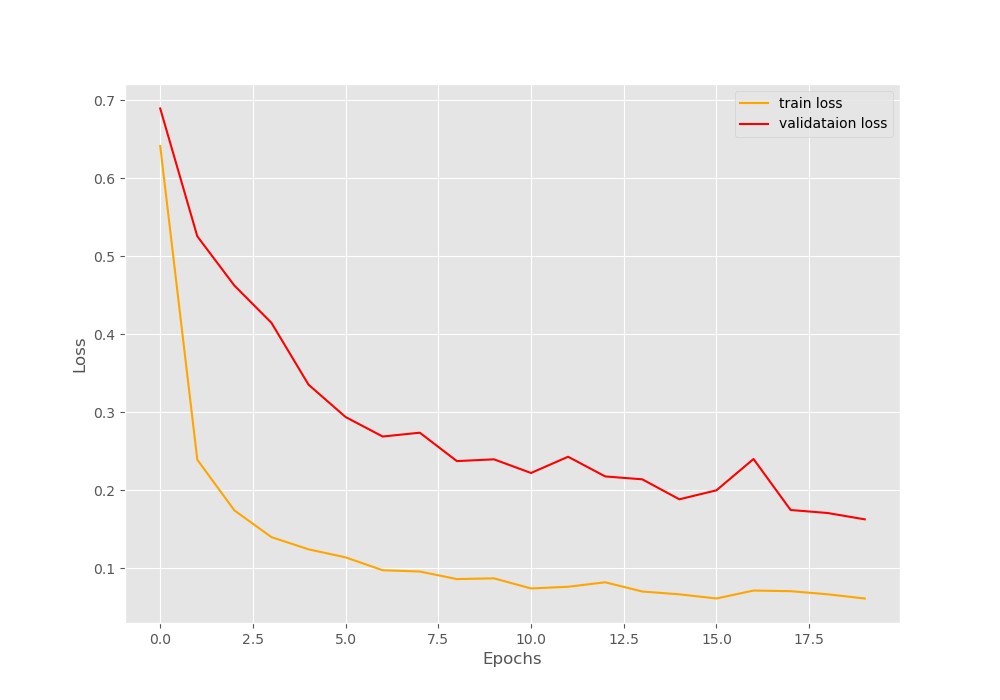
下面的是准确率和损失率变化图像,很直观的展示:
准确率:随着训练轮数的增加准确率显著上升!!!且训练集和验证集的准确率最终逐渐趋于一致
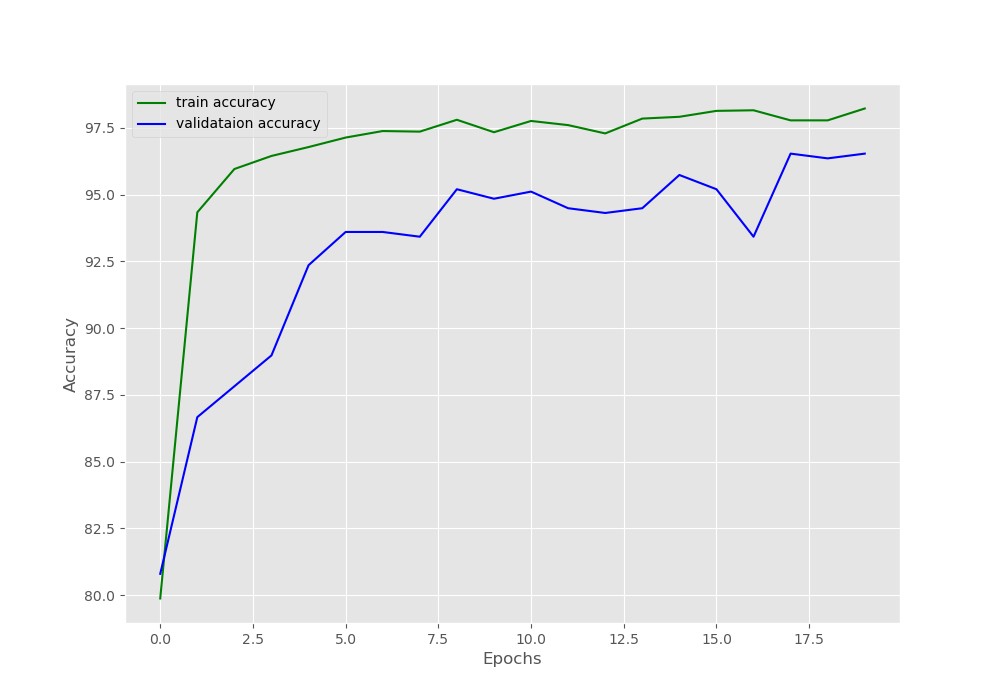
损失率:训练集和验证集的损失率显著下降,最终训练集的损失率降低到了0.05左右
五、训练总结
5.1 最终性能指标
验证准确率: 96.53%
训练准确率: 98.22%
验证损失: 0.163
训练损失: 0.061
5.2 各类别准确率进展
| 类别 | 第1轮 | 第20轮 | 提升幅度 |
|---|---|---|---|
| cloudy | 87.42% | 98.43% | +11.01% |
| desert | 49.30% | 95.78% | +46.48% |
| green_area | 79.28% | 97.04% | +17.76% |
| water | 98.28% | 94.48% | -3.80% |
5.3关键观察
5.3.1 优秀表现
desert类巨大进步 :从49%提升到96%,说明模型成功学会了识别沙漠特征
整体性能卓越 :96.53%的验证准确率非常优秀
训练稳定 :损失持续下降,没有明显过拟合
收敛良好 :最后几轮性能稳定在高水平
5.3.2 需要注意
water类轻微下降 :从98%降到94%,但仍保持高水平
训练时间波动 : 某些epoch训练时间较长(可能受系统资源影响)
5.4 训练动态分析
5.4.1关键转折点
第5轮: desert类突破78%,整体准确率超过92%
第9轮: 首次达到95%+验证准确率
第18轮: 达到峰值96.53%,desert类突破96%
5.4.2 收敛情况
最后5轮性能稳定在95-96.5%之间,说明模型已经充分训练。
这还只是考虑性能和速度将epoch设置在了20的情况下,如果训练次数设置在32/64,效果应该会更好(根据你的电脑性能决定)~~~
到此这篇关于基于深度学习的卫星图像分类(kaggle比赛实战)的文章就介绍到这了,更多相关基于深度学习的卫星图像kaggle比赛内容请搜索代码网以前的文章或继续浏览下面的相关文章希望大家以后多多支持代码网!
赞 (0)
您想发表意见!!点此发布评论



发表评论