【神经网络】卷积神经网络CNN
82人参与 • 2024-08-01 • 机器学习
卷积神经网络
欢迎访问blog全部目录!
文章目录
1. 神经网络概览
leijnen, stefan & veen, fjodor. (2020). the neural network zoo. proceedings. 47. 9. 10.3390/proceedings47010009.
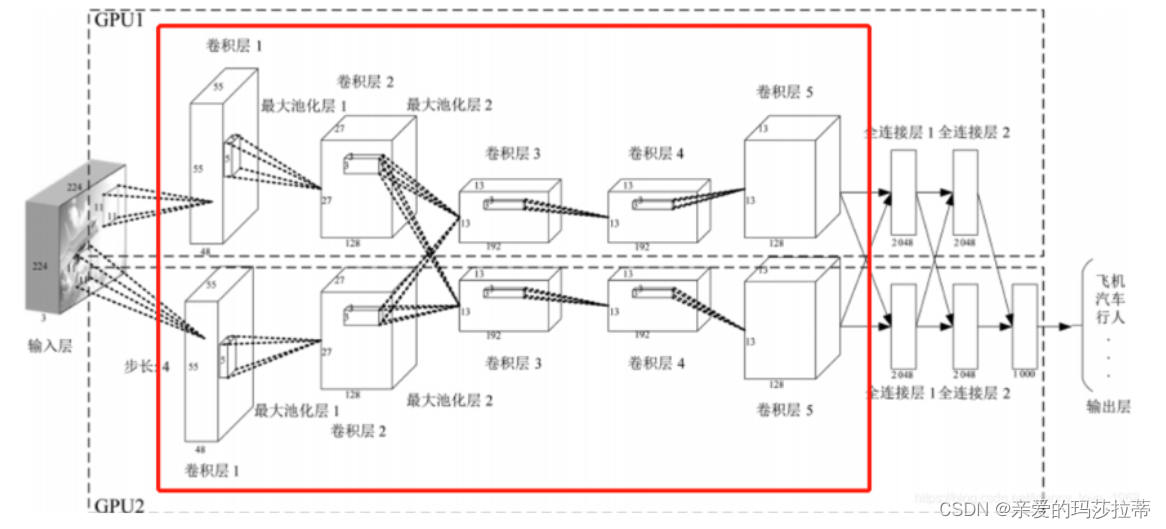
2.cnn(convolutional neunal network)
cnn的核心为使用卷积核对图像矩阵进行卷积运算(线性运算)!!!
2.1.学习链接
学习笔记:深度学习(3)——卷积神经网络(cnn)理论篇_cnn理论-csdn博客
【深度学习】一文搞懂卷积神经网络(cnn)的原理(超详细)_卷积神经网络原理-csdn博客
2.2.cnn结构
2.2.1.基本结构
2.2.1.1输入层
图片在计算机中是包括 (宽,高,深)的三维矩阵,元素为灰度值或rgb值,其中矩阵的深即为rgb层次。如果为rgb图片,图片深度为3。图片的三维矩阵即为cnn的输入。(宽,高)矩阵为1个channel,(宽,高)矩阵为特征图。

输入层即接收原始图片数据,cnn可以保留图片的连续像素(物体的不变性),加深神经网络对图片的理解。
2.2.1.2.卷积层|convolution layers
作用:捕捉图片的局部特征而不受其位置的影响。
多个卷积核叠加即为卷积层。
卷积层后需接激活函数(如relu)来引入非线性。
2.2.1.3.池化层|pooling layers
作用:通过减小特征图的大小(下采样)来减少计算复杂性。它通过选择池化窗口内的最大值或平均值来实现。这有助于提取最重要的特征。
有点类似于图像的模糊处理!
2.3.1.4.全连接层|linear layers
全连接层将提取的特征映射转化为网络的最终输出。这可以是一个分类标签、回归值或其他任务的结果。
2.2.2.核心要素
| 名称 | name | 含义 |
|---|---|---|
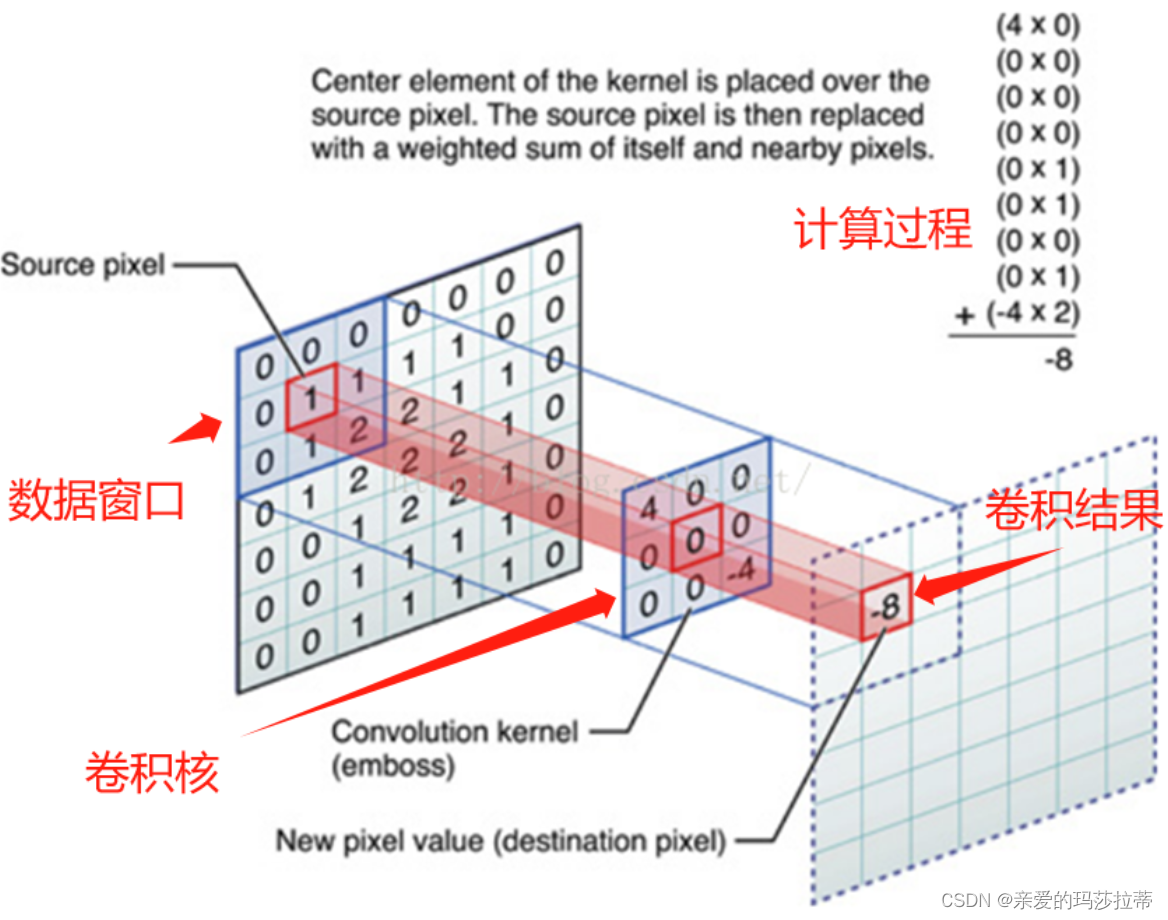
| 过滤器(卷积核) | 过滤器为可移动的三维小窗口矩阵(n*n*n)【kernel_size】,它是一组固定的权重。卷积操作即为将卷积核与图像进行逐元素相乘后相加。 | |
| 步长 | stride | 卷积核每次滑动位置的步长。 |
| 卷积核的个数 | out_channels | 决定输出矩阵的深度depth。一个卷积核输出一个深度层。 |
| 填充值 | zero-padding | 在外围边缘补充若干圈0,方便从初始位置以步长为单位可以刚好滑倒末尾位置。数据填充的主要目的是确保卷积核能够覆盖输入图像的边缘区域,同时保持输出特征图的大小=输入特征图大小。 如果想要维持特征图大小不变, p a d d i n g = ( k e r n e l _ s i z e − 1 ) / 2 padding=(kernel\_size-1)/2 padding=(kernel_size−1)/2!! |
以下图为例(图示为conv2d):
步长=2,卷积核个数=2,填充值=1(在图片周围补1圈0),卷积核尺寸为3*3*3
2.3.pytorch cnn
api:torch.nn.convolution-layers — pytorch 2.2 documentation
2.3.1.区分conv1d与conv2d
| conv1d | conv2d | |
|---|---|---|
| 输入 | 语音:二维矩阵 | 图像:三维矩阵 |
| 卷积核 | (卷积核尺寸(二维),卷积核个数) | (卷积核尺寸(三维),卷积核个数) |
| 总结 | 在特征图内只能竖着扫 | 在特征图内先横着扫再竖着扫 |
图像的cnn使用的是conv2d!!
2.3.2.cnn搭建与参数
import torch
import torch.nn as nn
class cnn(nn.module):
def __init__(self):
super(cnn, self).__init__()
self.conv1 = nn.sequential( # 输入图像尺寸为(1,28,28)
nn.conv2d(
in_channels=1, # 输入图像的深度 灰度图为1,rgb图为3
out_channels=16, # 卷积核个数,输出图像的深度
kernel_size=5, # 卷积核尺寸5*5*1
stride=1, # 步长
padding=2 # 填充大小 如果想要 con2d 出来的图片长宽没有变化, padding=(kernel_size-1)/2
), # 输出图像尺寸为(16,28,28)
nn.relu(), # 激活函数
nn.maxpool2d(
kernel_size=2, # 池化小区域尺寸2*2,区域模糊
# stride=2, # 步长,默认=kernel_size
), # 输出图像尺寸为(16,14,14)
)
self.conv2 = nn.sequential( # 输入图像尺寸为(16,14,14)
nn.conv2d(
in_channels=16, # 输入图像的深度
out_channels=32, # 卷积核个数,输出图像的深度
kernel_size=5, # 卷积核尺寸5*5*16
stride=1, # 步长
padding=2 # 填充大小
),
nn.relu(),
nn.maxpool2d(
kernel_size=2,
) # 输出图像尺寸为(32,7,7)
)
self.out = nn.linear(32 * 7 * 7, 10) # 输出10*1的矩阵
def forward(self, x):
x = self.conv1(x)
x = self.conv2(x)
# x图像平铺成 (batch_size=1, 32 * 7 * 7)
x = x.view(x.size(0), -1) # view中一个参数定为-1,代表自动调整这个维度上的元素个数,以保证元素的总数不变。
output = self.out(x)
return output
cnn = cnn()
print(cnn)
'''
cnn(
(conv1): sequential(
(0): conv2d(1, 16, kernel_size=(5, 5), stride=(1, 1), padding=(2, 2))
(1): relu()
(2): maxpool2d(kernel_size=2, stride=2, padding=0, dilation=1, ceil_mode=false)
)
(conv2): sequential(
(0): conv2d(16, 32, kernel_size=(5, 5), stride=(1, 1), padding=(2, 2))
(1): relu()
(2): maxpool2d(kernel_size=2, stride=2, padding=0, dilation=1, ceil_mode=false)
)
(out): linear(in_features=1568, out_features=10, bias=true)
)
'''
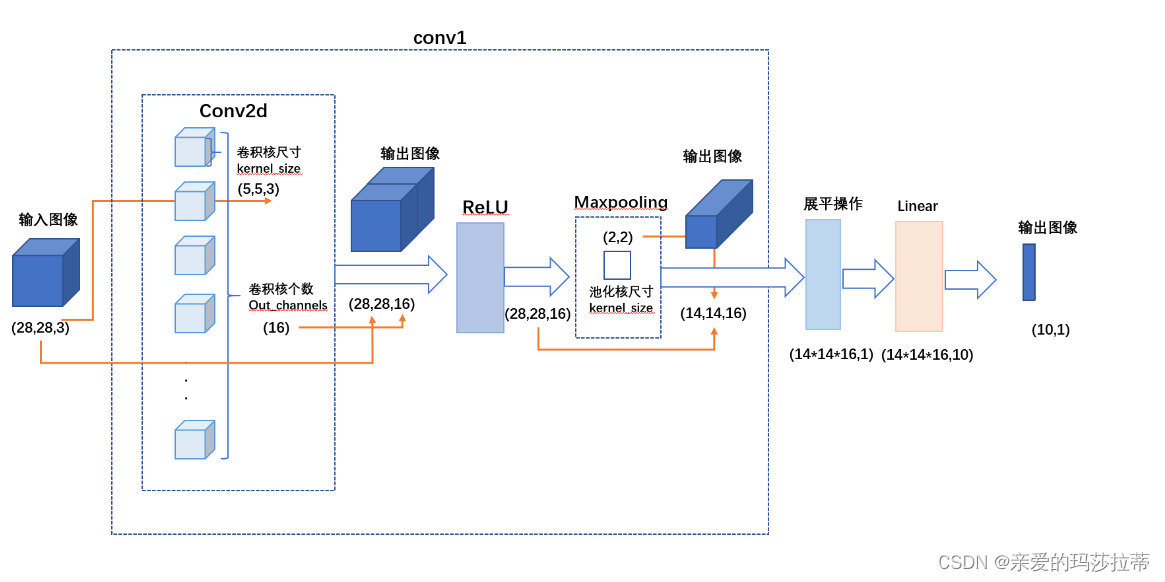
2.3.3.示意图⭐️
注:由于画幅有限,示意图仅画了1个大卷积层。
赞 (0)
您想发表意见!!点此发布评论




发表评论